Hi,
I am new to Mongoose Traveller, but have been a Traveller fan since the 80s.
I have a concept, but I am struggling to figure out how to implement it.
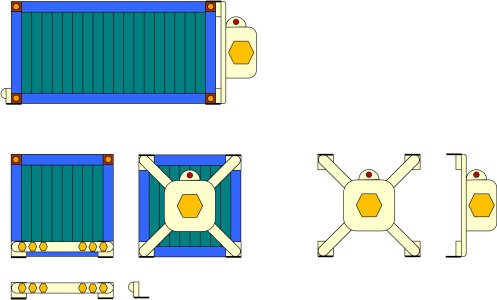
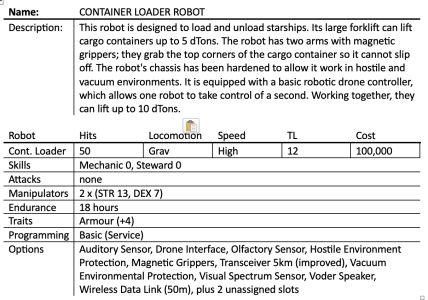
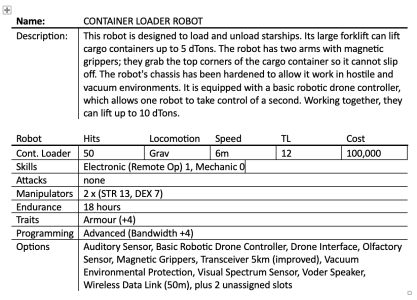
The idea is a robot "tug" that would be used to load and unload shipping containers from a small freighter. I had envisioned a two part robot. The main body would grab on to one end of the shipping container. It would have all the propulsion. The other part of the robot would basically be a drone with lots of grav lift capacity. It would go on the other end of the shipping container and hook on allowing the whole container to float. Once the robots have picked up the shipping container, then the main part would provide the thrust to move it. They would then float it out and stack the containers at the starport. This would be useful in places where they didn't have a lot of cargo handlers.
I had two thoughts, first was to develop a robot with enough slots to carry a 8 dTon cargo container (4 dTon in the picture). However, that would be 2048 spaces (a size 12 robot) and equivalent to 6,144 kg in weight. The thing is, I don't need or want the robot to have all those slots, I just want it to have enough grav power to lift and move them.
I had also thought about designing the lifting element as a vehicle and then giving it a robot brain.
My key design challenge is I don't want it to take up a huge amount of room in a ship when not in use.
Can anyone suggest a way to accomplish this?
Thank you,
- Kerry
I am new to Mongoose Traveller, but have been a Traveller fan since the 80s.
I have a concept, but I am struggling to figure out how to implement it.
The idea is a robot "tug" that would be used to load and unload shipping containers from a small freighter. I had envisioned a two part robot. The main body would grab on to one end of the shipping container. It would have all the propulsion. The other part of the robot would basically be a drone with lots of grav lift capacity. It would go on the other end of the shipping container and hook on allowing the whole container to float. Once the robots have picked up the shipping container, then the main part would provide the thrust to move it. They would then float it out and stack the containers at the starport. This would be useful in places where they didn't have a lot of cargo handlers.
I had two thoughts, first was to develop a robot with enough slots to carry a 8 dTon cargo container (4 dTon in the picture). However, that would be 2048 spaces (a size 12 robot) and equivalent to 6,144 kg in weight. The thing is, I don't need or want the robot to have all those slots, I just want it to have enough grav power to lift and move them.
I had also thought about designing the lifting element as a vehicle and then giving it a robot brain.
My key design challenge is I don't want it to take up a huge amount of room in a ship when not in use.
Can anyone suggest a way to accomplish this?
Thank you,
- Kerry